What is A*
A* (pronounced A-Star) is an algorithm to find one of the shortest paths between two points on a grid. It is used in fields as numerous as robotics, game development, and even travel route finding. Other algorithms can find the closest path between two points, but A* can find this path more efficiently and methodically. It uses a heuristic, or estimated cost function, to reach this efficiency (in this case it just calculates distance from the selected point and target).
Understanding
For most applications of A* you have a grid system, like a coordinate plane. To show A* look at this video by Sebastian Lague: https://www.youtube.com/watch?v=-L-WgKMFuhE . He has a whole series on A*, but I only watched this video for understanding the algorithm. The A* algorithm works with 2 main variables for each node (or square in the grid, in this case); a g value and an h value. The g value is the cost to move from the current node to its neighbour, while the h value is the heuristic. As explained earlier, the heuristic is the value to move from the current node to the end node. Both are defined with the same distance function: \[ Distance = \sqrt{(A_x-B_x)^2 + (A_y-B_y)^2} \] Where A is the current node, and B is the neighbour node in the case of g, and the end node in the case of h. g has 2 possible values: 1 for horizontal and vertical directions, and the square root of 2 for diagonal directions. h has a varying cost, however. f is the variable that results from the sum of g and h. f is the total cost. Since we try to make f as small as possible, A* is really a minimization algorithm of f. On paper, you simply pick the nodes with the smallest f values, evaluate them, and then evaluate their neighbours with the same minimization in mind till you reach the end.
Pseudocode
This is basically the schematics:
Make a grid of Nodes
Make a closedList of Nodes with no elements as a HashSet
foreach position in the grid
if position is walkable
make node available to move around
else
make node at position closed
add node to closedList
Set the startNode up in the grid with it's h, g, and f values
Make an openList of Nodes with a beginning element of startNode
Make a temporary Node named current
While the openList has elements
Set the current node to the node in openList with the lowest f cost
if current position is the same as the end position
Reconstruct the path by going from the end node's parent to its parent,
and so on and so forth, till you reach the start node
End the loop
Remove the current node from the openList
Add the current node to the closedList
foreach position in the neighbours of the current Node
if the position is out of bounds
end this foreach loop iteration
Set the Node called neighbour to the node at this grid position
if the closedList contains neighbour
end this foreach loop iteration
Set float GD to current.g + distance from current to neighbour
if the openList does not contain neighbour or GD < neighbour's g cost
Set neighbour.g to GD
Set neighbour.h to the distance from neighbour to end
Calculate neighbour.f
Set neighbour.parent to current
if the openList does not contain neighbour
Add neighbour to openList
Code
I made this code in Unity C#. I tried to make the explanation available to anyone, so I will go into a lot of detail on the basis. Here is the code:
This is a class or data type that the programmer creates with reusable features. Each grid position has one of these nodes to represent it. It holds the f cost and its components: g and h. It also has a parent (for path construction), cell type, and position.
public class Node
{
public Node parent; //This is the Node that the current Node has come from
public Vector2Int position; //The position of the Node (integer) with x and y components
public float g; //The cost to move. Either 1 or the square root of 2
public float h; //The distance from this node to the end
public float f; //The true cost. g + h
public Cell cell; //What type of grid position is this
public enum Cell
{
Open = 0,//Available for movement (kinda confusing with OpenList, I know)
Closed = 1,//Unavailable for movement
Start = 2,//The start node
End = 3,// The end node
}
public void GetFCost()
{
f = h + g;//calculates the f cost as h + g
}
Below are all the ways to construct a node (constructor).
public Node(Node Parent, Vector2Int Position, float G, float H)//Initialization method
{
this.parent = Parent;
this.position = Position;
this.g = G;
this.h = H;
}
public Node(Vector2Int Position, Cell Cell, float H)//Initialization method
{
this.position = Position;
this.cell = Cell;
this.h = H;
}
public Node(Vector2Int Position, Cell Cell)//Initialization method
{
this.position = Position;
this.cell = Cell;
}
public Node()//Initialization method. Empty.
{
}
}
This is the main pathfinding function
public void PathFind()
{
You start with a grid of nodes with (dimension * dimension) elements. Then you make a closedList with no beginning elements. The closedList is a hashset. For all purposes, here, the hashset is used because it stores a bunch of data that can be scanned easily. After node evaluation, all candidate nodes for the path are placed in the closedList to make sure they aren’t evaluated, for no purpose, later.
grid = new Node[dimension, dimension]; //A grid like the x and y axis
closedList = new HashSet(); //Basically a list with no input index.
//It just compares every element in it really fast
Initialize each element in the grid as open or closed (floor and wall tiles). I decided to use Perlin Noise for this, but you don’t need to know it for A*.
for (int x = 0; x < dimension; x++)
{
for (int y = 0; y < dimension; y++) //Loop through each x and y value in the grid
{
float sample = Mathf.PerlinNoise((x + seed) * .1f, (y + seed) * .1f);
//Just a perlin noise function. (Not Important)
if (sample >= floorThreshold) //Make the node Open
{
grid[x, y] = new Node(new Vector2Int(x, y), Node.Cell.Open,
DirectionDistance(new Vector2Int(x, y), endPos));
//Set the values of a node
//The DirectionDistance is the h cost
Instantiate(floor, new Vector2(x, y), Quaternion.identity);
//Instantiate or create a tile at this position
}
else //Make the node Closed
{
grid[x, y] = new Node(new Vector2Int(x, y), Node.Cell.Closed,
DirectionDistance(new Vector2Int(x, y), endPos));
//Set the values of a node
Instantiate(wall, new Vector2(x, y), Quaternion.identity); //Make a wall
closedList.Add(grid[x, y]); //Add to the closed list
}
}
}
Initialize a node, with a defined position, to be the start node.
Node startNode = grid[startPos.x, startPos.y]; //Set the startNode
startNode.g = 0; //Make the g cost (cost to go from the parent to this) 0.
//This happens because you spawn here and don't move.
startNode.GetFCost(); //Set the f cost
Make a list of nodes (basically a, changing, quantity of nodes that each have a corresponding integer index), called the openList, to store all the nodes that can be evaluated. It only begins with the start node in it.
openList = new List() { startNode }; //Make a list, basically an array without a set max
//number of elements. It has an integer value that points to a Node.
//It has the startNode only, originally.
First make a temporary, "current", node. While, the openList has elements you make the temporary node the node with the lowest f cost, until the temporary node is the end node.
Node current = new Node(); //The current node. It is not set yet
while (openList.Count > 0) //While the openList has elements
{
current = GetLowestFCost(openList); //Get the node with the lowest cost,
//from the openList.
if (current.position == endPos) //If the current
//position is the same as the end position
{
ReconstructPath(); //Explained later
Debug.Log("Found"); //Show that it is found
return; //End the loop and pathfinding code
}
Show that you have calculated the current node.
openList.Remove(current); //Remove the current node from the openList
closedList.Add(current); //Add the current node to the closedList
//Do this because both have been evaluated
Get the neighbours of the current node and add them to the openList if the list does not contain them.
foreach (Vector2Int pos in ReturnNeighbours(current.position)) //Get the positions
//of the neighbours of the current node (nodes that are close by).
{
if (!Bound(pos)) continue; //If the position is outside of the
//array end this foreach loop iteration
Node neighbour = grid[pos.x, pos.y]; //Get the node from the position value
if (closedList.Contains(neighbour)) continue; //If this node has already been
//evaluated, and placed in the closed list, end this foreach loop iteration
float GD = current.g + DirectionDistance(current.position, neighbour.position);
//Basically the current path's g cost.
if (!openList.Contains(neighbour) || GD < neighbour.g) //If the openList does not
//contain this neighbour, or if this new path has a lower g (distance) cost
{
neighbour.g = GD; //Set the neighbour's g cost to GD
neighbour.h = DirectionDistance(neighbour.position, endPos); //Set the h cost
neighbour.GetFCost(); //Calculate the f cost.
neighbour.parent = current;
//Set the parent of the neighbour to the current node, for path reconstruction
if (!openList.Contains(neighbour))
//If the openList does not contain the neighbour node
{
openList.Add(neighbour); //Add the neighbour node
}
}
}
}
Debug.Log("Not Found"); //If the loop terminates without finding a path say it.
}
These are the helper functions. The first reconstructs the path by going from the end node to the start node using the parent variable of each node. The second checks if a position is within the bounds of the grid. The third gets the node with the lowest f cost from a list of nodes. The fourth calculates distance between two points. The fifth gets the neighbours of a position.
public void ReconstructPath() //To get the path from the start to the end
{
Node current = grid[endPos.x, endPos.y]; //The current position. Begins as the end position.
while(current != null)
//If the current position exists. Important when you reach the start node.
{
Instantiate(marker, new Vector3(current.position.x, current.position.y, 0),
Quaternion.identity); //Create a marker of the path
current = current.parent; //Set the temporary current node to its parent
}
}
public bool Bound(Vector2Int pos) //Check if the position exists
{
//Basically if x or y is more than zero (positive) or less than the dimension return true
if (pos.x >= 0 && pos.y >= 0 && pos.x < dimension && pos.y < dimension) return true;
return false; //If x or y are less than zero (negative),
// or more than or equal to the dimension of the grid return false
}
public Node GetLowestFCost(List nodes) //Get the node with the lowest f cost.
{
Node best = nodes[0]; //Begin with the current best node. Lets begin with the first
foreach (Node node in nodes) //Loop through all nodes
{
if (best.f >= node.f) best = node; //Since we are trying to minimize the f cost,
// set the best node to the one with the lowest f cost
}
return best; //Return the best node
}
public static float DirectionDistance(Vector2Int start, Vector2Int end)
//Get the distance from a to b. This is the typical method with the Pythagorean Theorem.
{
float x = (start.x - end.x) * (start.x - end.x); //Square the x distance from a to b
float y = (start.y - end.y) * (start.y - end.y); //Square the y distance from a to b
return Mathf.Sqrt(x + y);
//Square root it to find the true, straight line, or angled distance
}
public static Vector2Int[] ReturnNeighbours(Vector2Int pos) //Get the current position
{
Vector2Int[] Difference =
{
new Vector2Int(1,0),
new Vector2Int(1,1),
new Vector2Int(0,1),
new Vector2Int(-1,1),
new Vector2Int(-1,0),
new Vector2Int(-1,-1),
new Vector2Int(0,-1),
new Vector2Int(1,-1),
}; //Basically all the vectors/displacements to go to the neighbour
Vector2Int[] temp = new Vector2Int[8];
//An array with 8 elements, that represent the displaced positions
for(int i = 0; i < 8; i++) //For every element in temp
{
temp[i] = Difference[i] + pos; //Get the displaced position
if (temp[i].x < 0 || temp[i].y < 0) //If it is not bounded
{
temp[i] = Vector2Int.zero; //Return zero
}
}
return temp; //Return the temp array
}
Final Statements
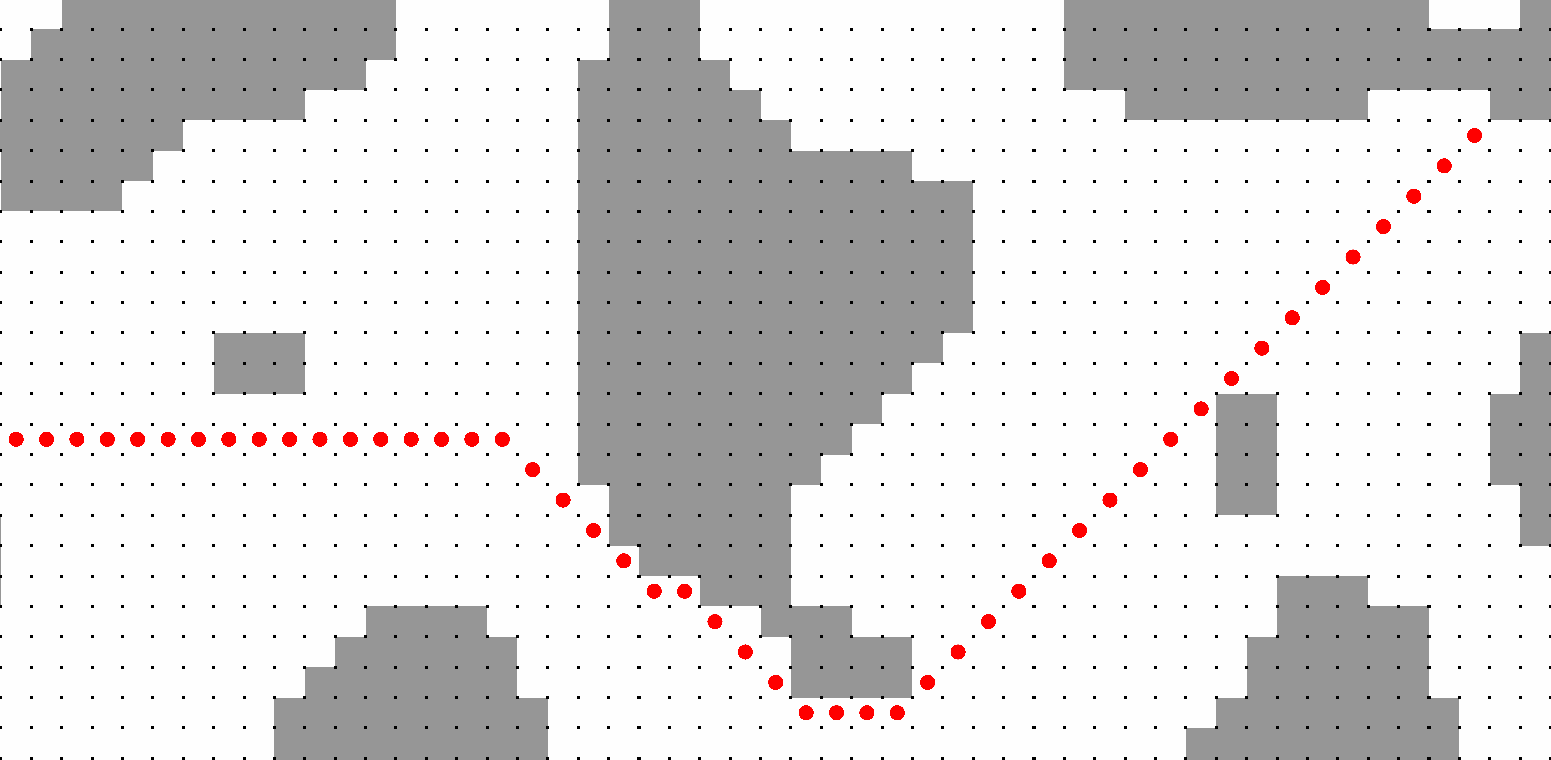
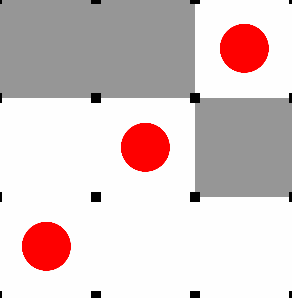
A quick thing to note that is that I used Euclidean distance for the heuristic (h value) even though there were other options. I also made a slight oversight in the code by allowing A* to clip through diagonal walls like below (Grey is the wall, white is the floor, and red is the path marker). This can be fixed by checking all the nodes in the cardinal directions when moving diagonally.
All in all, I hope this explanation was helpful. A* is a very useful tool in many fields. There is a github repository, by me, that you can look at. Also, (completely off topic) an interesting thought I had when making this project was how humans are naturally ingrained with good pathfinding skills. It takes such a complex algorithm to mimic something that man can do so easily. That is fascinating. I might explore this topic with possibly a machine learning algorithm that is played against A* and humans. I also might do a project on robot pathfinding with A*, so stayed updated if interested. With that I would like to thank you for reading.
Sources & Thanks
It would not be right if I did not become clear with my use of AI. I used ChatGPT with making this code, but I believe this article is a testament to my improved understanding of this topic.
https://en.wikipedia.org/wiki/A*_search_algorithm
https://www.youtube.com/watch?v=-L-WgKMFuhE